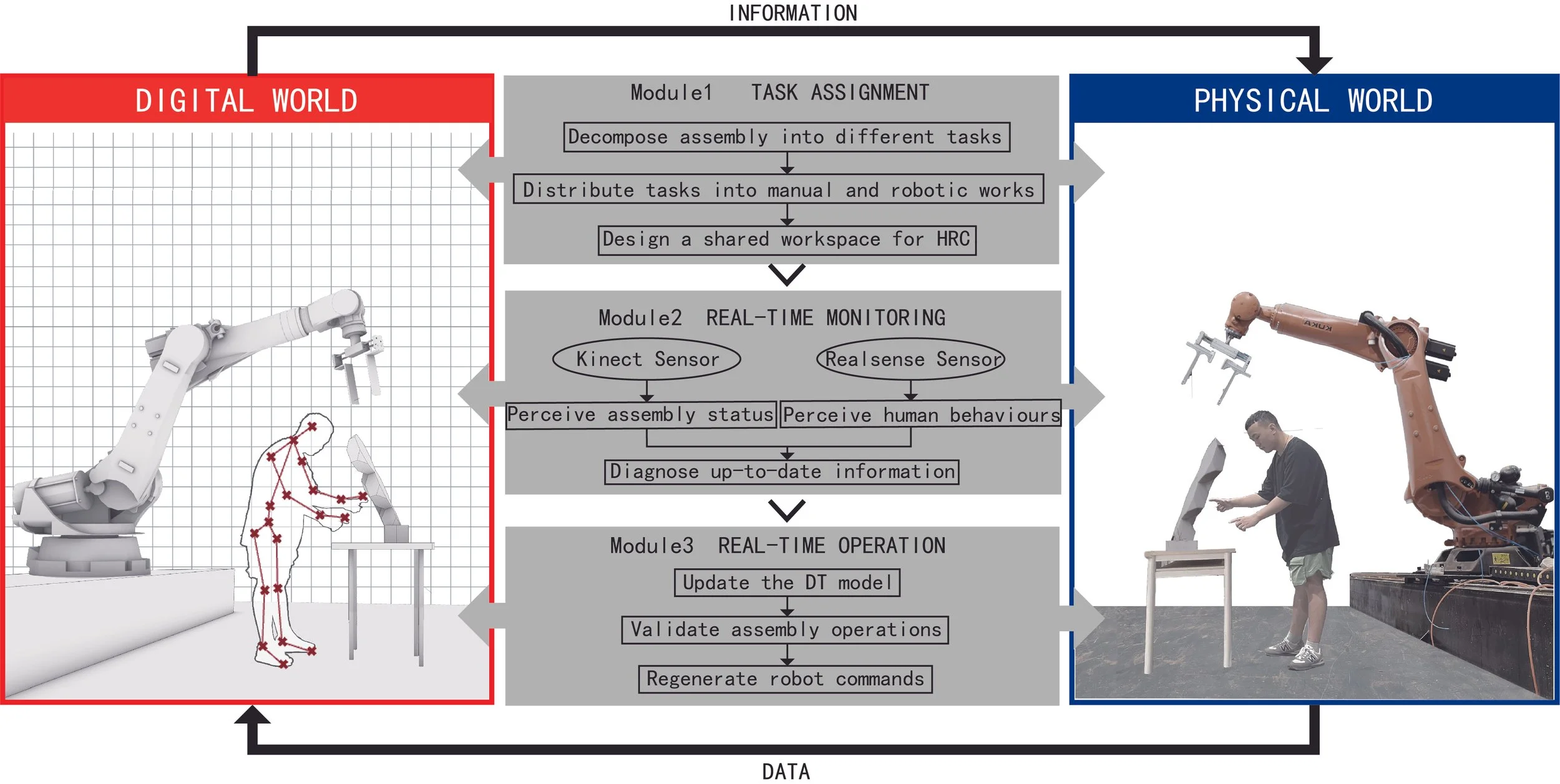
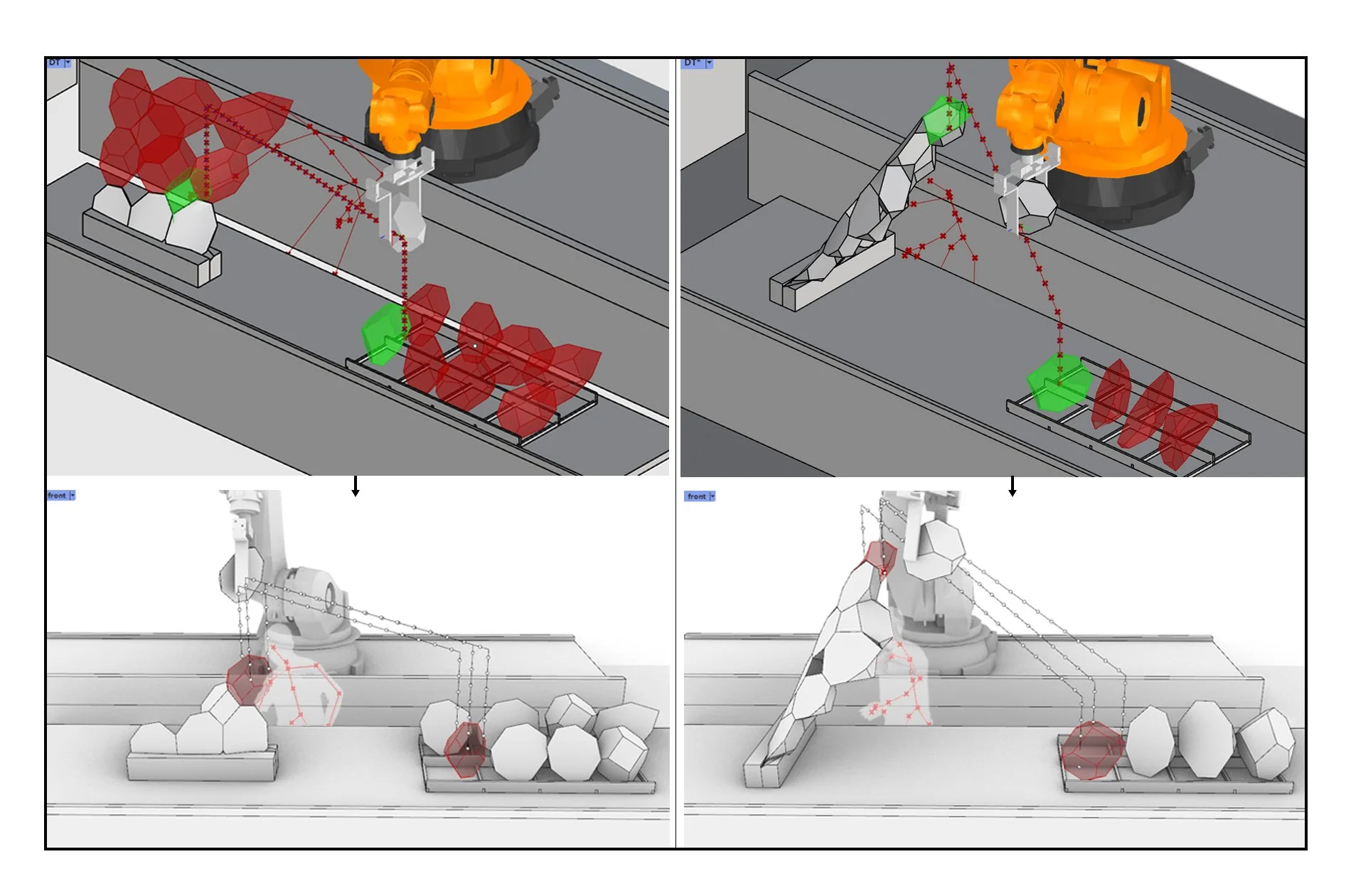
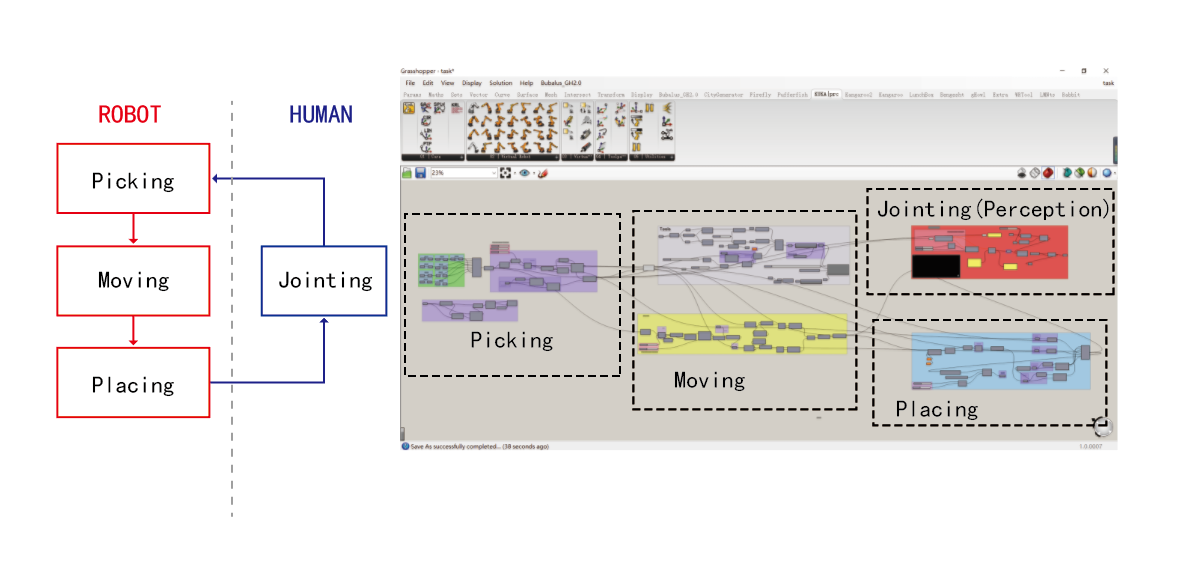
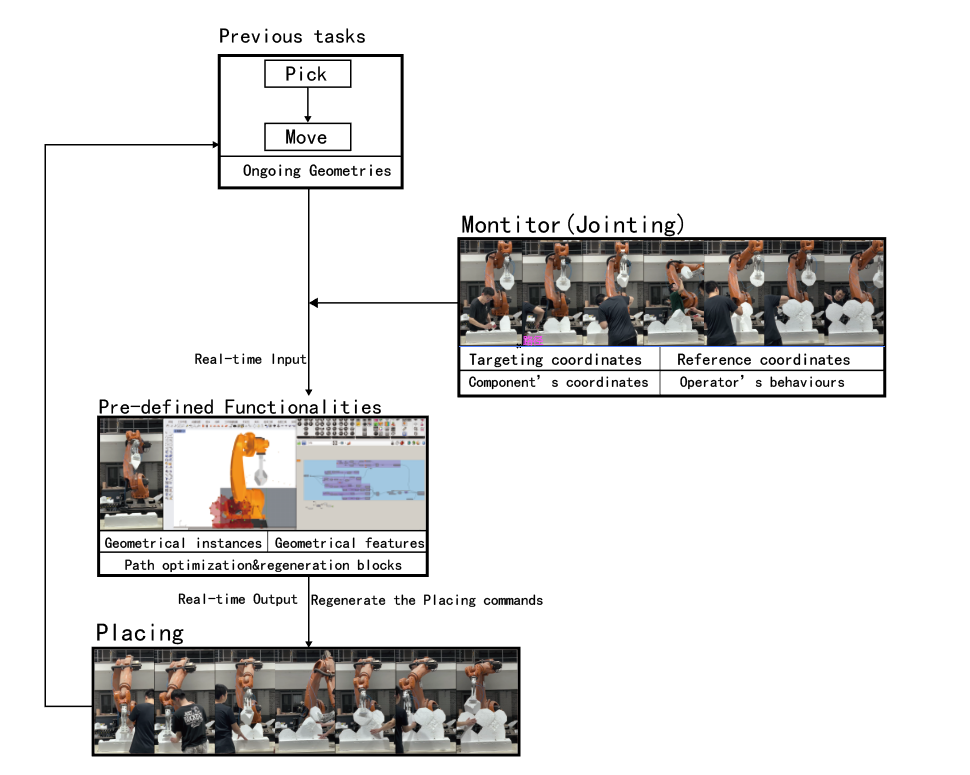
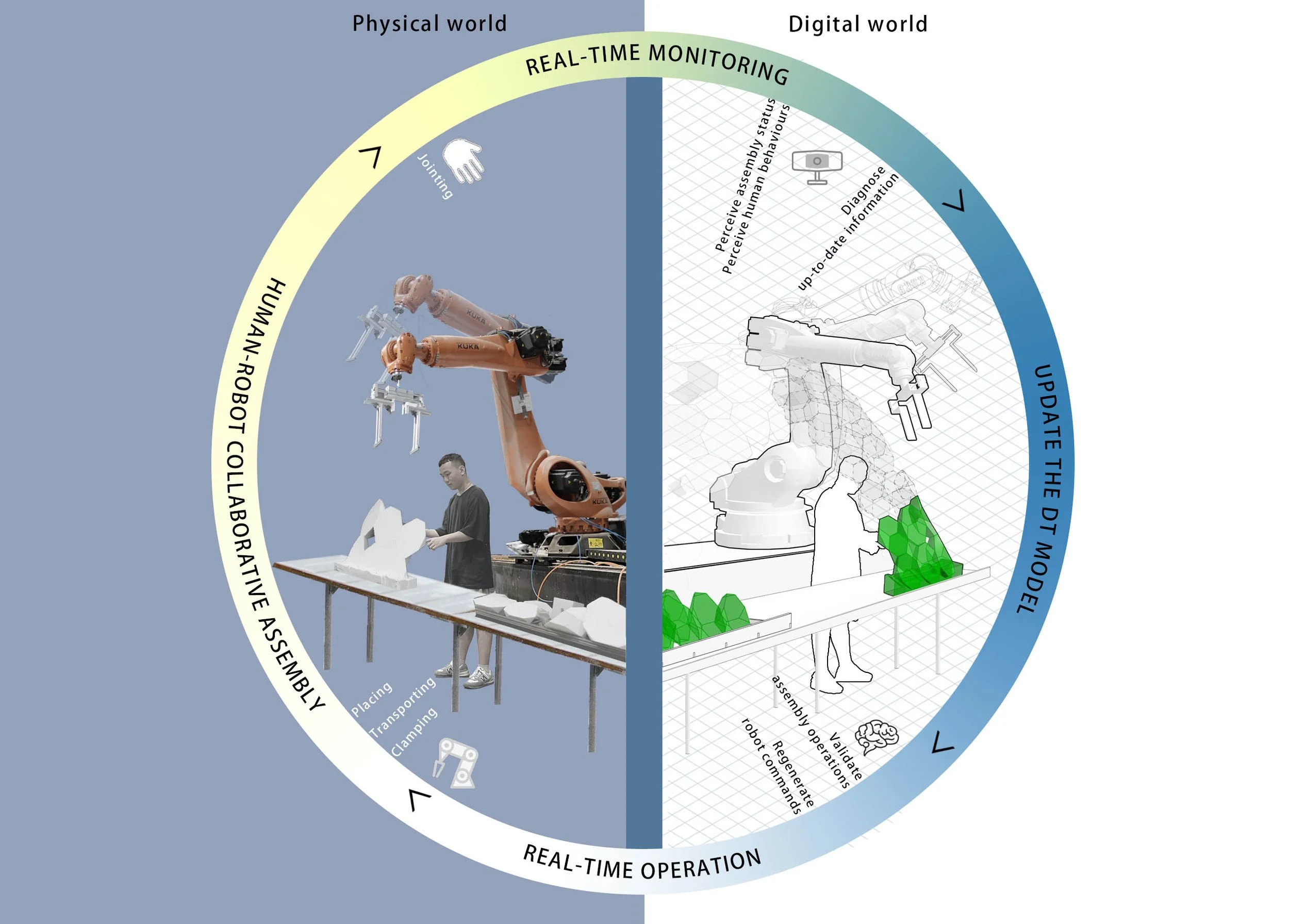
The assembly of complex-shaped architectures is expensive and time-consuming due to the task’s complexity and the workflow’s rigidity. We propose an efficient, flexible, and adaptive approach by using Digital Twin (DT) within a human-robot collaborative system to solve the problem. Human-robot collaboration allows the right amount of automation, while DT enables the system to validate with up-to-date information. During the assembly process, the digital model keeps updating, and the corresponding robotic commands are regenerated simultaneously by mirroring both the gradually evolved architectural geometries and the behaviors of the operator. The success of the methodology is demonstrated by building an experimental complex-shaped pavilion. Compared to the imprecise, totally manual methods or inflexible, completely automatic methods, the real-time optimized human-robot collaborative approach proposed by this study improves the efficiency and flexibility of the assembly process in the architectural realm.
Please read the paper for more information: Ye Z, Jingyu L, Hongwei Y. A digital twin-based human-robot collaborative system for the assembly of complex-shaped architectures. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture. 2022;0(0). doi:10.1177/09544054221110960